

Э��ջ����main()��������
ZMain�ļ�->ZMain.c->main() �����������ص��˽�osal_start_system()����
int main( void )
{
//�ر������ն�
osal_int_disable( INTS_ALL );
//Ӳ�����ӵij�ʼ��������led�ij�ʼ��
HAL_BOARD_INIT();
//����ѹ��ȷ����ѹ��ʹCC2530����
zmain_vdd_check();
// ��ʼ�����ӵ�I/O
InitBoard( OB_COLD );
// ��ʼ��Ӳ������
HalDriverInit();
// ��ʼ��NVϵͳ
osal_nv_init( NULL );
// MAC�ij�ʼ��
ZMacInit();
// ��չ��ַ�ij�ʼ��
zmain_ext_addr();
// ��ʼ��NV��Ŀ
zgInit();
#ifndef NONWK
//AF��ij�ʼ�����ڽ�ֹNONWK��ʱ����Ҫ��ʼ��AF��
afInit();
#endif
//��ʼ������ϵͳ
//ά���¼����ĺ���������������-��osalInitTasks();
osal_init_system();
// ���ж�
osal_int_enable( INTS_ALL );
// �弶�ճ�ʼ��
InitBoard( OB_READY );
// �豸��Ϣ��ʾ
zmain_dev_info();
//���������LCD����ôִ��LCD��ʼ��
#ifdef LCD_SUPPORTED
zmain_lcd_init();
#endif
#ifdef WDT_IN_PM1
//��������˿��Ź�����ôִ��ʹ�ܿ��Ź�����
WatchDogEnable( WDTIMX );
#endif
//ϵͳִ�е���ڣ�ע����������Dz������е��˺�������һ�䣬
//Ҳ����return���ģ���Ϊ����˺����Ժ��һֱ������ѭ��ִ����������������ѭ����
osal_start_system();
return 0;
} // main()
����osal_start_system()������ͨ��go to�ķ�ʽ����ת��������ȥ
void osal_start_system( void )
{
#if !defined ( ZBIT ) && !defined ( UBIT )
for(;;) // Forever Loop //����for��ѭ�����൱��while(1);
#endif
{
osal_run_system(); //�������������osalϵͳ��
}
}
OSAL�������
ZigBee Э��ջ������ ZigBee Э��ľ���ʵ�֡�OSAL ����һ��֧�ֶ��������е�ϵͳ��Դ������ơ��� ZigBee Э��ջ�У�OSAL ������ȸ�����������У�������¼������ˣ���������Ӧ���¼������������д�����
��ô���¼���������¼����������������ϵ�������أ�
ZigBee �в��õķ����ǣ�����һ���¼����������������Ķ�Ӧ���¼���������һ�����������������������¼����������ĵ�ַ��Ȼ�������ű�����ij�ֶ�Ӧ��ϵ����ijһ�¼�����ʱ����Һ������ҵ���Ӧ���¼������������ɡ�
����osal_run_system()������ͨ��go to�ķ�ʽ����ת��������ȥ����������OSAL�����л��ơ�
void osal_run_system( void )
{
uint8 idx = 0;
osalTimeUpdate();
Hal_ProcessPoll();
//��ѯ�����¼����Ƿ����¼��������Ӹ����ȼ��������п�ʼ��ѯ
// const uint8 tasksCnt = sizeof( tasksArr ) / sizeof( tasksArr[0] ); ��ʼ�������������ҽ��г�ʼ��
do {
if (tasksEvents[idx]) // Task is highest priority that is ready.
{
break;
}
} while (++idx < tasksCnt);
if (idx < tasksCnt)
{
uint16 events;
halIntState_t intState;
HAL_ENTER_CRITICAL_SECTION(intState); /* �����ٽ���---����EA״̬Ȼ����EA = 0 */
//������������¼�ȡ�����ŵ�events�����У�����tasksEvents[idx]����
// uint16 *tasksEvents; ָ���¼�������ַ��
//Э��ջ�е��¼����ö�����ķ�ʽ��
// ZigBee Э��ջʹ��һ�� unsigned short �͵ı�������Ϊ unsigned short ����ռ�����ֽڣ�
// �� 16 ��������λ����ˣ�����ʹ��ÿ��������λ��ʾһ���¼�������������Э��ջ����
// ��ϵͳ�¼�SYS_EVENT_MS G��ʮ�����ƣ�0x8000��������0b100000000000000 0��
//���õľ��Ǹ�λ����ʾ���¼�����ϵͳ��ʼ��ʱ������������¼���ʼ��Ϊ 0��
events = tasksEvents[idx];
tasksEvents[idx] = 0; // Clear the Events for this task.
HAL_EXIT_CRITICAL_SECTION(intState); /* �˳��ٽ���---�ָ�EA״̬ */
activeTaskID = idx;
// ��������ָ��
// typedef unsigned short (*pTaskEventHandlerFn)( unsigned char task_id, unsigned short event );
// ����ָ�����飬ָ�������¼���������
// const pTaskEventHandlerFn tasksArr[] = {}
// �������¼�����������ͨ��eturn (events ^ SYS_EVENT_MSG);����������δ�������¼�
events = (tasksArr[idx])( idx, events );
activeTaskID = TASK_NO_TASK;
HAL_ENTER_CRITICAL_SECTION(intState); /* �����ٽ���---����EA״̬Ȼ����EA = 0 */
// ��δ�����������е��¼�����д�ص��¼�����
tasksEvents[idx] |= events; // Add back unprocessed events to the current task.
HAL_EXIT_CRITICAL_SECTION(intState); /* �˳��ٽ���---�ָ�EA״̬ */
}
#if defined( POWER_SAVING ) //�������ģʽ
else // Complete pass through all task events with no activity?
{
osal_pwrmgr_powerconserve(); // Put the processor/system into sleep
}
#endif
}
�¼����ķ���ռ䣺
�鿴main()�����е�ϵͳ��ʼ������osal_init_system();——> �����ʼ������osalInitTasks();
void osalInitTasks( void )
{
uint8 taskID = 0;
//���¼�������ռ�ͨ��osal_mem_alloc������
tasksEvents = (uint16 *)osal_mem_alloc( sizeof( uint16 ) * tasksCnt);
//ʹ��osal_memset�������¼���ȫ����ʼ��Ϊ0
osal_memset( tasksEvents, 0, (sizeof( uint16 ) * tasksCnt));
macTaskInit( taskID++ );
nwk_init( taskID++ );
Hal_Init( taskID++ );
#if defined( MT_TASK )
MT_TaskInit( taskID++ );
#endif
APS_Init( taskID++ );
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_Init( taskID++ );
#endif
ZDApp_Init( taskID++ );
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_Init( taskID++ );
#endif
SampleApp_Init( taskID ); //�û��Լ����ӵ������ʼ������
}
�����¼�������������ռ䣺
const pTaskEventHandlerFn tasksArr[] = {
macEventLoop,
nwk_event_loop,
Hal_ProcessEvent,
#if defined( MT_TASK )
MT_ProcessEvent,
#endif
APS_event_loop,
#if defined ( ZIGBEE_FRAGMENTATION )
APSF_ProcessEvent,
#endif
ZDApp_event_loop,
#if defined ( ZIGBEE_FREQ_AGILITY ) || defined ( ZIGBEE_PANID_CONFLICT )
ZDNwkMgr_event_loop,
#endif
SampleApp_ProcessEvent //�û��Լ��������е��¼���������
};
ע�⣺�����ʼ��������ÿ������ij�ʼ�����������������¼����������е������¼���������һһ��Ӧ��
�� ZigBee Э��ջ�У�����������������Ҫ��
tasksCnt—�ñ���������������ܸ�����
�ñ���������Ϊ��uint8 tasksCnt������ uint8 �Ķ���Ϊ��typedef unsigned char uint8
tasksEvents—����һ��ָ�룬ָ�����¼�������ַ��
�ñ���������Ϊ��uint16 *tasksEvents������ uint16 �Ķ���Ϊ��typedef unsigned short
uint16
tasksArr—����һ�����飬 �����ÿһ���һ������ָ�룬 ָ�����¼���������
�������������const pTaskEventHandlerFn tasksArr[]������ pTaskEventHandlerFn ��
������typedef unsigned short (*pTaskEventHandlerFn)( unsigned char task_id, unsigned short
event )�����Ƕ�����һ������ָ�롣tasksArr �����ÿһ���һ������ָ�룬ָ�����¼�
����������

�¼��� �����е��¼�����������
OSAL��Ϣ����
�ᵽ�¼������ǾͲ��ò��ᵽ��Ϣ���¼�����������ȥִ��ijЩ��������������ϵͳ�в�����һ���¼���OSAL ������¼����ݸ���Ӧ��������������ִ��һ����Ӧ�IJ����������¼���������ȥ������ ��
ͨ��ijЩ�¼�����ʱ���ְ�����һЩ������Ϣ�IJ��������磺�����߽��յ����ݺ���� AF_INCOMING _MSG_CMD ��Ϣ������������¼����������ڴ�������¼���ʱ����Ҫ�õ��յ������ݡ�
��ˣ������Ҫ���¼������ݷ�װ��һ����Ϣ������Ϣ���͵���Ϣ���У�Ȼ�����¼����������оͿ���ʹ�� osal_msg_receive ����Ϣ�����еõ�����Ϣ��afIncomingMSGPacket_t *MSGpkt; //������Ϣ����������Ӧ�Ľ�����Ϣ�ı���
MSGpkt = (afIncomingMSGPacket_t *)osal_msg_receive( SampleApp_TaskID ); //ǿ��ת���ɶ�Ӧ����Ϣ����
OSALά����һ����Ϣ���У�ÿһ����Ϣ���ᱻ�ŵ������Ϣ������ȥ����������յ�ʱ����Դ���Ϣ�����л�ȡ�����Լ�����Ϣ��Ȼ�������Ϣ��������������Ӧ�Ĵ������ɡ�
OSAL����Ϣ��������ͼ��ʾ��
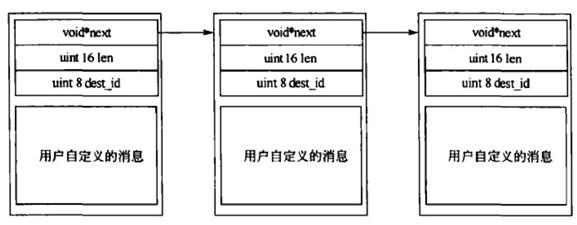
ÿ����Ϣ������һ����Ϣͷosal_mag_hdr_t���û��Զ������Ϣ��osal_msg_hdr_t�ṹ��Ķ���Ϊ:
typedef struct
{
void *next;
uint16 len;
uint8 dest_id;
} osal_msg_hdr_t;

�ȵ�����







�����ˣ�Xena

�����ˣ�Scorpio

�����ˣ�Wing
-
 �Ƽ����ܡ�����δ��
�Ƽ����ܡ�����δ��
-
��ע����

 ��ע����Զ��
��ע����ѧԺ
��ע����Զ��
��ע����ѧԺ

 ��ע����Զ��
��ע����ѧԺ
��ע����Զ��
��ע����ѧԺ
 ����
����

 ��ǰλ��:
��ǰλ��:  �߶˿γ�
�߶˿γ�
 ԤԼ��ʦ
ԤԼ��ʦ
 �������
�������



 ȫ����ѯ���ߣ�400-611-6270
ȫ����ѯ���ߣ�400-611-6270